ScreenBot Operator Assist
Reduce repetitive HMI actions in autonomous shovel operations.
ScreenBot integrates with shovel operator controls and AHS interface workflows to simplify operator actions, reduce cognitive load, and improve consistency in day-to-day operation.

1 / 2
ScreenBot started as a custom response to an operational need and progressed into a fielded solution used in production workflow. It includes in-house hardware, microcontroller-based control logic, network-aware functionality, and firmware upgradability. We present ScreenBot as a deployment engagement because practical value depends on machine setup, control mapping, and operating procedures at each site.
What this enables
- Designed from real operator workflow constraints, not a lab-only concept.
- Targets reduced cognitive load and fewer repetitive interface actions.
- Built for maintainability with firmware update pathways.
Best fit for
- Mining teams operating autonomous or semi-autonomous haul workflows.
- Operations leaders focused on operator efficiency and workflow consistency.
- Sites that need custom integration with existing control and HMI environments.
Capabilities
Operator workflow simplification
ScreenBot is designed to reduce unnecessary interface steps and streamline the actions operators need to execute repeatedly.
Integration-aware architecture
The solution is built to integrate with machine controls and autonomous system interfaces, with deployment details tuned per site.
Field-maintainable firmware
Documentation includes firmware and hardware servicing flows, supporting ongoing improvement after deployment.
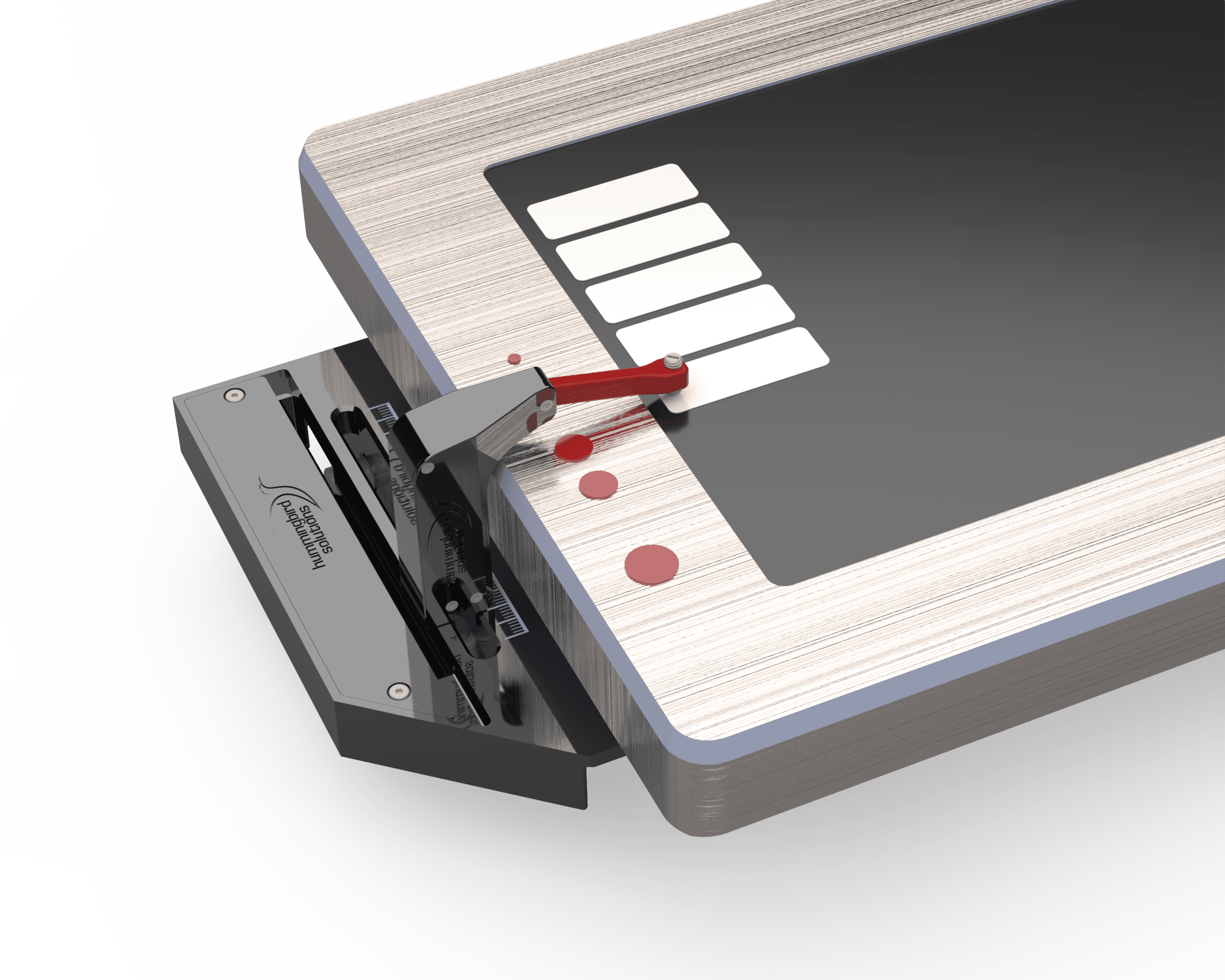
Visual walkthrough
ScreenBot Operator Assist in the field
Explore ScreenBot fit
Use the contact form to review machine compatibility, integration approach, and pilot rollout options.